Robotic Fish
A Biologically Inspired Underwater Robot
Why I Built It
During the final year of my undergraduate studies at Tallinn University of Technology, I joined the Center for Biorobotics, an institute dedicated to research at the intersection of biology and engineering. My fascination with animal social dynamics—particularly how fish follow a leader in group behavior—led me to explore an engineering perspective:
🐟 What makes a fish a leader? What physical and behavioral characteristics influence which individuals get followed?
To investigate these questions, I set out to design and build a robotic fish—a mechanical "carrier" fish capable of leading real fish by mimicking the qualities of an effective leader. This project became my undergraduate Mechatronics BSc thesis at Budapest University of Technology.
Challenges & Innovation
Creating a life-like robotic fish required a departure from traditional rigid-body robotics. Instead of using fixed joints and motors, I developed a flexible-body design, incorporating a novel silicon-polymer material to create a compliant, undulating tail.
However, modeling the fluid dynamics of a soft-bodied robot proved exceptionally complex. Fish-body interactions with water are highly nonlinear, making it difficult to simulate and predict movement mathematically. Instead, I followed an iterative design approach, refining each prototype based on real-world testing.
🚀 Interesting Facts:
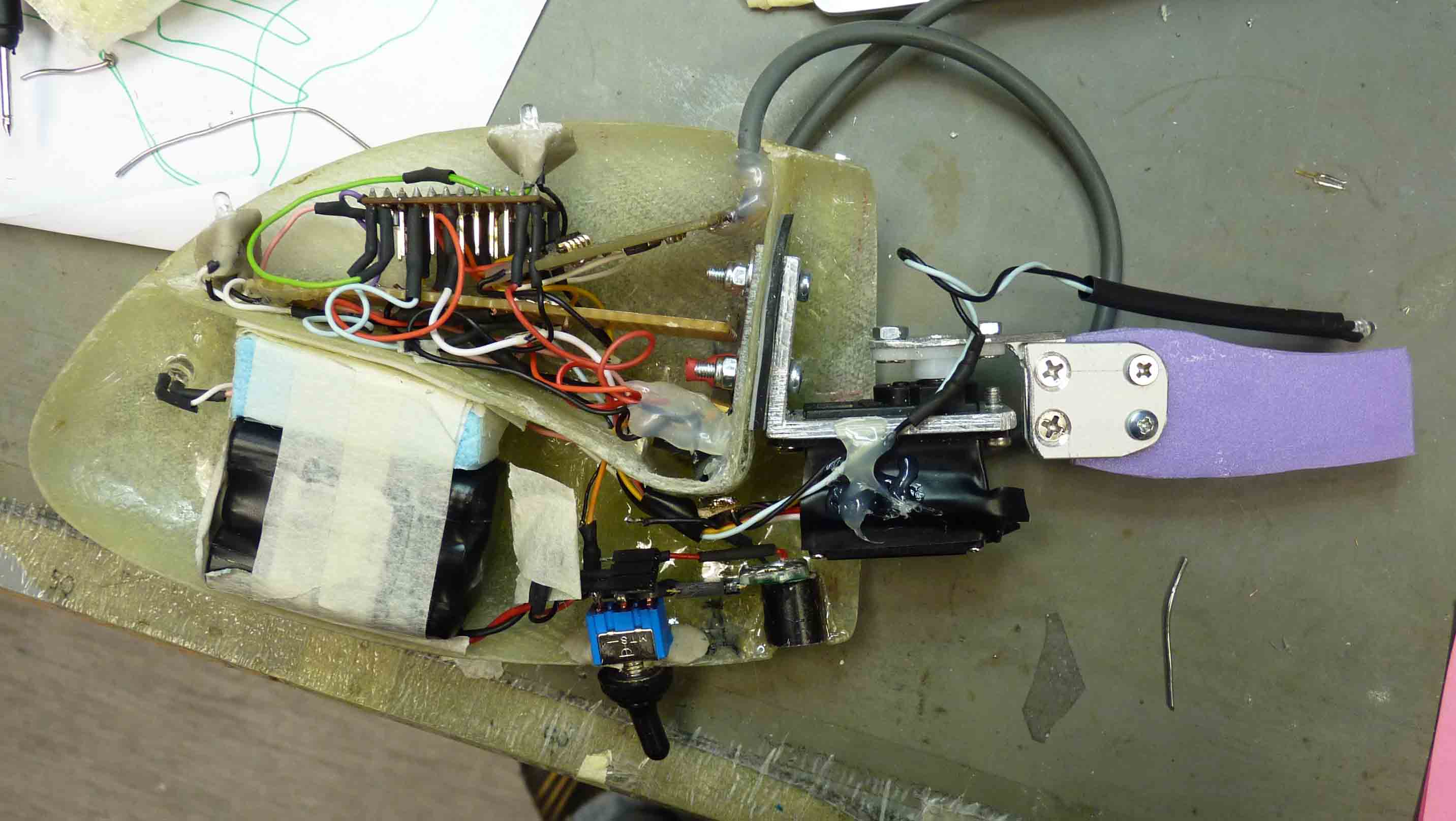
- ✔️ This was built before 3D printing was widely available—I manually handcrafted and molded all the components.
- ✔️ The robotic fish was powered by an Arduino platform for control and actuation.
- ✔️ It achieved 2-3 body lengths per second, making it one of the fastest biologically inspired robotic fish at the time.
- ✔️ The robot's movement left behind the same vortex patterns as real fish, confirming its natural swimming motion.
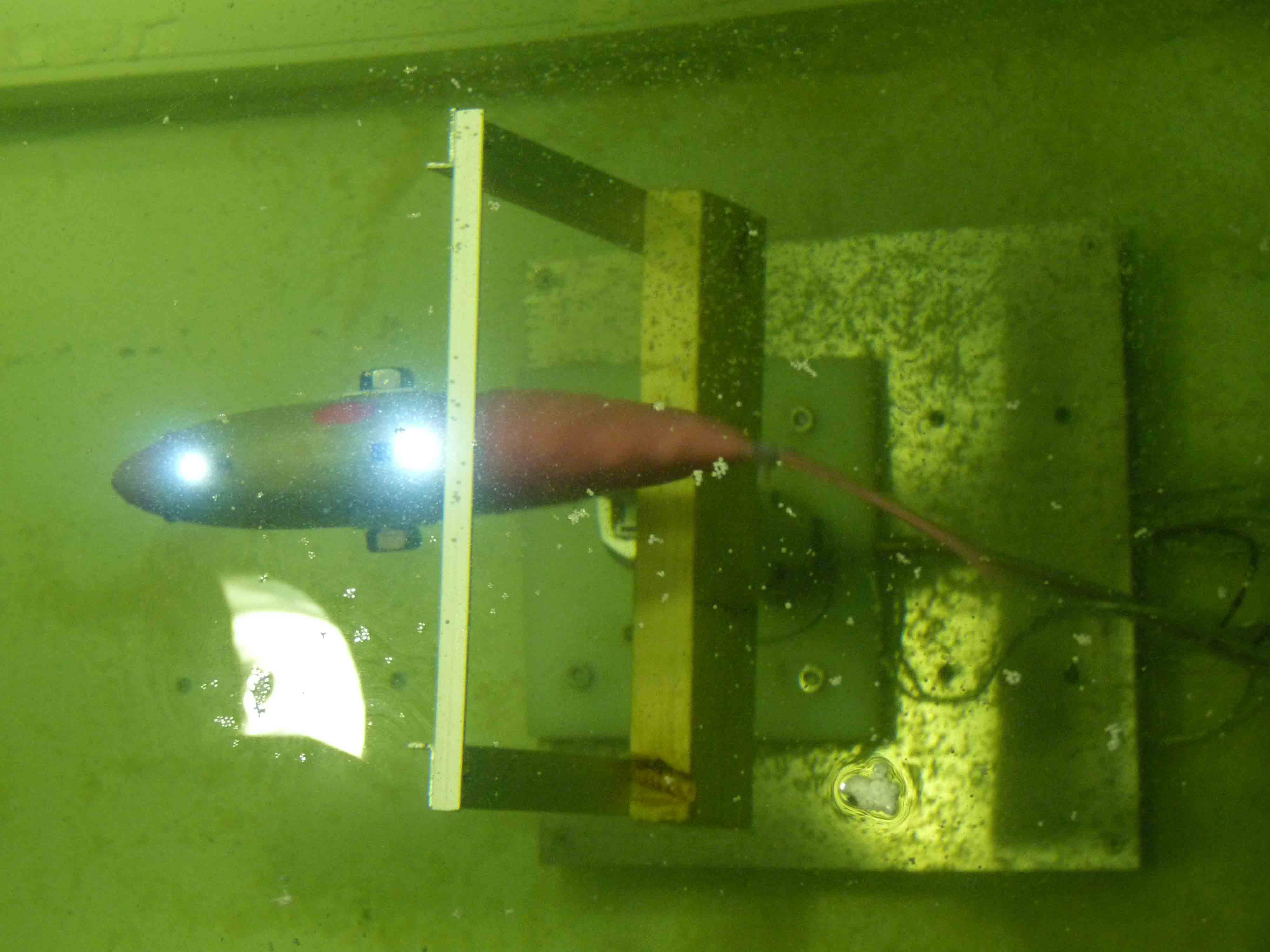
Final Prototype & Results
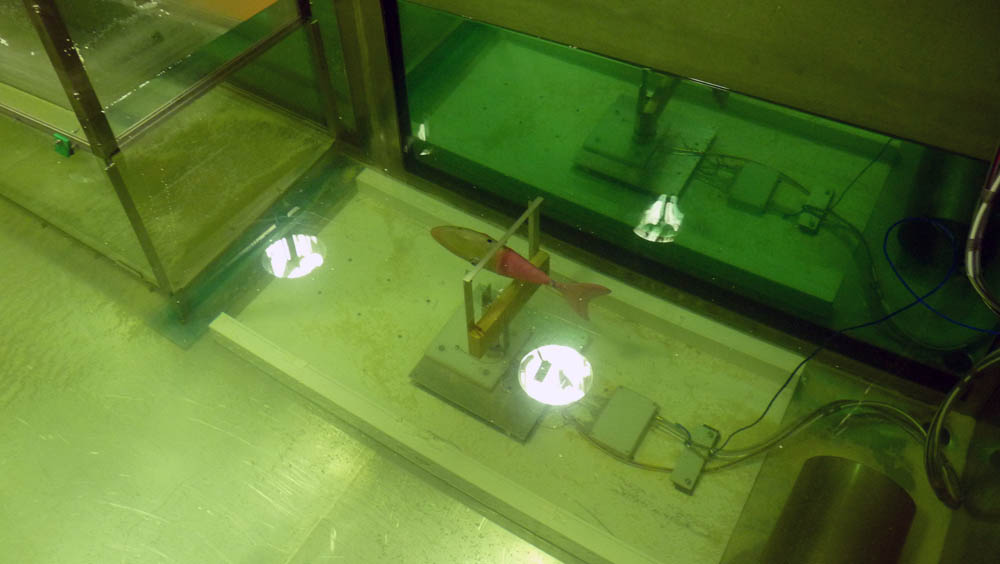
The end product was a fully functional robotic fish that successfully demonstrated biologically inspired swimming. By using force sensors, I measured the propulsion efficiency, comparing its performance to other robotic fish designs from that era.
Although the mechanisms of leadership in fish schools remain a complex, multi-layered topic, this project pushed the boundaries of soft robotics in underwater environments and opened up new possibilities for bioinspired marine robotics.
Future & Collaboration
Even today, I remain fascinated by underwater robotics and marine exploration. If you're working on a related project and looking for a collaborator—feel free to reach out!